Communication Specification¶
This document specifies the communication between the host and a controller with the AYAB firmware.
Sequence Chart¶
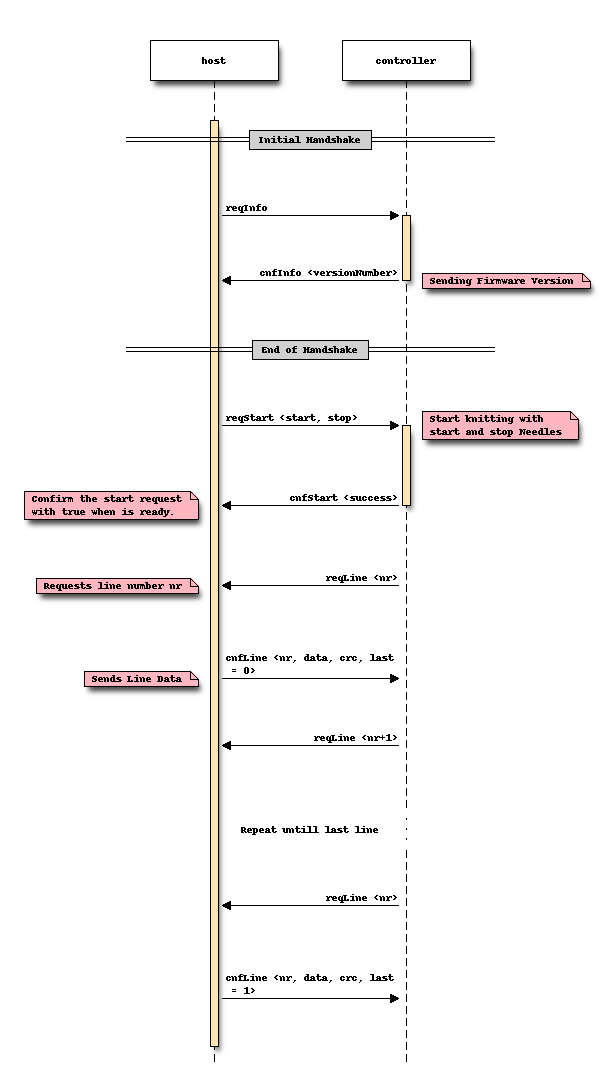
The host waits for a indState(true) message before requesting to start the knitting. On startup, the Arduino continuously checks for the initialization of the machine (carriage passed left hall sensor). When this happens, it sends an indState(true) to tell the host that the machine is ready to knit. After receiving this message, the host sends a reqStart message, which is immediately confirmed with a cnfStart message. When reqStart was successful, the Arduino begins to poll the host for line data with reqLine, the host answers with cnfLine. This reqLine/cnfLine happens each time the carriage moves passed the borders given by the Start/StopNeedle parameters in reqStart. When the host does not have any more lines to send, it marks the last line with the lastLine flag in its last cnfLine message.
To see an example implementation, see the states of the communication
module.
Message Identifier Format¶
Messages start with a byte that identifies their type. This byte is called “id” or “message id” in the following document. This table lists all the bits of this byte and assigns their purpose:
| Bit | Value | Name | Description and Values |
|---|---|---|---|
| 7 | 128 | message source |
|
| 6 | 64 | message type |
|
| 5 | 32 | reserved | must be zero |
| 4 | 16 | ||
| 3 | 8 | message identifier | These are the values that identify the message. See also |
| 2 | 4 | ||
| 1 | 2 | ||
| 0 | 1 |
Message definitions (API v4)¶
The length is the total length with id
and parameters. Note that the two characters \r\n following the message are
not included in the length.
| source | name | id | length | parameters |
|---|---|---|---|---|
| host | 0x01 | 3 |
Start and |
|
| hardware | 0xC1 | 2 |
|
|
| hardware | 0x82 | 2 |
|
|
| host | 0x42 | 29 |
|
|
| host | 0x03 | 1 | ||
| hardware | 0xC3 | 4 |
|
|
| hardware | 0x84 | 8 |
|
|
| hardware | 0x23 | var | A debug string. The id is the character #.
The length is variable and can be determined
by the end \r\n'. |
|
| host | 0x04 | 1 | put the controller into test mode | |
| host | 0xC4 | 2 |
|
The reqStart Message¶
The host starts the knitting process.
- Python:
StartRequest - Arduino: h_reqStart
- table: reqStart
- requests answer: The cnfStart Message
- direction: host → controller
The cnfStart Message¶
The controller indicates the success of The reqStart Message.
- Python:
StartConfirmation - Arduino: h_reqStart
- table: reqStart
- answers: The reqStart Message
- direction: controller → host
The reqLine Message¶
The controller requests a new line from the host.
More than 256 lines are supported. There are three possibilities for the next line based on the last line:
- the new line is greater than the last line
- the new line is lower than the last line
- the new line is the last line
We choose the line closest to the last line. This is trivial for (3). In case two lines are equally distant from the last line, we choose the smaller line.
This is computed by the function AYABInterface.utils.next_line() which
is tested and can be seen as a reference implementation for other languages.
- Python:
LineRequest - Arduino: Knitter::reqLine
- table: reqLine
- requests answer: The cnfLine Message
- direction: controller → host
The cnfLine Message¶
The host answers The reqLine Message with a line configuration.
This table shows the message content without the first byte that identifies the message:
| Byte | Name | Description |
|---|---|---|
| 0 | line number | These are the lowest 8 bit of the line. They must match the line number in The reqLine Message. |
| 1 | needle positions | Each bit of the bytes represents a needle position.
For the exact mapping of bits to needles see the table below. |
| 2 | ||
| ... | ||
| 24 | ||
| 25 | ||
| 26 | flags | Bits:
|
| 27 | crc8 checksum | This checksum is computed from bytes 0 to 26, including byte 26. The controller may use this checksum to check the result and if the checksum does not match, it can send The reqLine Message anew. |
In the following table, you can see the mapping of bytes to needles.
Note
- The Needles are counted from the leftmost needle on the machine.
- The Needle count starts with
0. - The Byte numbering is taken from the table above.
- The Bit numbering is consistent with Message Identifier Format. The highest bit has the number 7 and the lowest bit has number 0.
| Byte | 1 | 2 | 24 | 25 | |||||||||||||||||||||||||||||
| Bit | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | ... | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Needle | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ... | 198 | 199 | ||||||||||||||||||||
- Python:
LineConfirmation - Arduino: h_cnfLine
- table: cnfLine
- answers: The reqLine Message
- direction: host → controller
The reqInfo Message¶
The host initializes the handshake.
- Python:
InformationRequest - Arduino: h_reqInfo
- table: reqInfo
- requests answer: The reqInfo Message
- direction: host → controller
The cnfInfo Message¶
The controller answers The reqInfo Message with the API version.
- Python:
InformationConfirmation - Arduino: h_reqInfo
- table: cnfInfo
- answers: The reqInfo Message
- direction: controller → host
The indState Message¶
This is sent when the controller indicates its state.
When ready it is
1, then this is the first state indication. The machine is now ready to knit0, the controller is in test mode. This message is sent periodically. The reqTest Message switches this on.- Python:
StateIndication - Arduino: Knitter::indState
- table: indState
- direction: controller → host
The debug Message¶
This message ends with a \r\n like evey message.
It contains debug information from the controller.
- Python:
Debug - Arduino: DEBUG_PRINT
- table: debug
- direction: controller → host
The reqTest Message¶
This message puts the controller in a test mode instead of a knitting mode.
- Python:
TestRequest - Arduino: h_reqTest
- table: reqTest
- requests answer: The cnfTest Message
- direction: host → controller
The cnfTest Message¶
This messsage confirms whether the controller is in the test mode. If success is indicated, the controller sends The indState Message messages periodically, containing the sensor and position values.
- Python:
TestConfirmation - Arduino: h_reqTest
- table: cnfTest
- answers: The reqTest Message
- direction: controller → host
References¶
See also
- the original specification
- the
hardware messages modulefor messages sent by the hardware - the
host messages modulefor messages sent by the host - a discussion about the specification